
Согласно определению википедии движитель или опорно-ходовой элемент - это устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного средства,из которых наиболее распространённые: колесо и гусеницы(траки), далее экзотические: воздушная подушка и шнеки, последние являются основным предметом моего творческого преобразования.
Первый шнекоход изобретён в 1868 г. Якобом Моратом, в России же шнекоход относят к 1900 году, когда русскому изобретателю Ф. Дергинту был выдан патент на схожее техническое решение и вот по прошествии более чем века автор этой статьи пытается доказать,что шнеко-роторный движитель не раскрыл полностью своего потенциала и на его основе конструирует новый опорно-ходовой элемент ТЕШ-драйв, который будет востребован для создания амфибийных платформ и транспортных средств специального назначения.
Видимо, основной движущей силой для новаторской мысли в направлении развития различных вездеходных систем в нашей стране стали её бескрайние просторы и плохие дороги, а местами их полное отсутствие.
Итак, шнек,как видно на рисунке, представляет собой цилиндр с наваренными спиралями архимедовых винтов. Таких цилиндров у шнекохода два, причём винтовая навивка лопастей разносторонняя, то есть одна по часовой стрелке, другая - против. К основным достоинствам шнеко-роторного движителя можно отнести сочетание свойств поплавка и гребного винта, что позволяет ему прекрасно справлятся с обводнёнными грунтами и форсировать водные преграды, выходить на берег в любом месте, легко справляясь, в силу своих высоких грунто-зацепных свойств, с крутыми откосами береговой линии. Но при этом скорость перемещения этих вездеходов невысока - до 20 км/час,а энергозатраты огромны, причём часть энергии расходуется просто на рыхление почвы и это делает невозможным перемещение шнеко-роторной техники по дорогам общего пользования.
 Пожалуй, самая известная машина этого типа ЗиЛ-2906, входящий в состав поисково-спасательного комплекса "Синяя птица", предназначенного для эвакуации космонавтов из труднодоступных районов посадки. К месту работы ЗиЛ-2906 доставляется на борту шестиколёсного вездехода.
Пожалуй, самая известная машина этого типа ЗиЛ-2906, входящий в состав поисково-спасательного комплекса "Синяя птица", предназначенного для эвакуации космонавтов из труднодоступных районов посадки. К месту работы ЗиЛ-2906 доставляется на борту шестиколёсного вездехода.
Тандем колеса и шнека работал по следующей схеме: когда дорожные условия ухудшаются настолько, что не позволяют дальше перемещаться основной, колёсной платформе, тогда на землю выгружается шнекоход, который отправляется до точки назначения, по слабым грунтам, и после выполнения задачи возвращается к основной, колёсной машине.
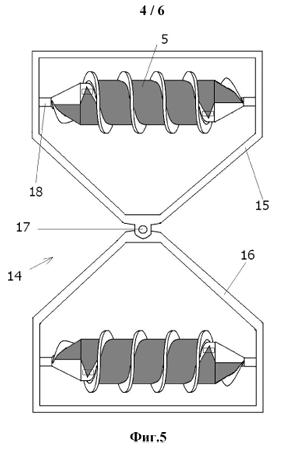
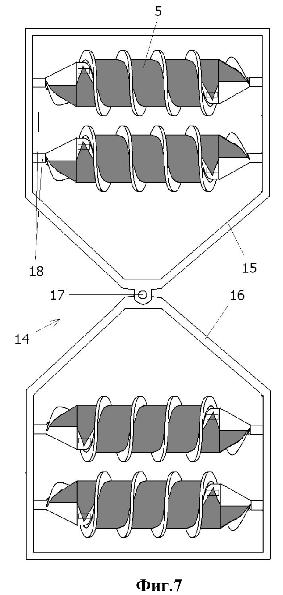
Концепция трансформируемых шнеков Теш-Драйв - это объединение колёсного и шнекового движителя на одной раме. Для этого в межвитковом пространстве шнеко-ротора размещён элемент с изменяемой геометрией, резиновый рукав, который в расширенном состоянии воспринимает вес транспортного средства, позволяет ему двигаться в режиме качения, - это основной рабочий режим Теш-Драйва, пока дорожные условия позволяют.


Когда же на пути вездехода появляется препятствие в виде обводнённых, рыхлых грунтов Теш-Драйв переводится в шнековый режим, через уменьшение объёма межвиткового элемента, воздух (жидкость) выпускается.Транспортное средство при этом режиме пермещается “боком”. В случае узкой дороги со слабыми грунтами в шнековом режиме можно будет перемещатся и по зигзагообразной траектории, пока транспортное средство не выйдет на открытое место, либо пока грунты не станут более плотными и можно будет вновь перевестись в режим качения. В процентном соотношении время движения в шнековом режиме занимает гораздо меньшую долю, чем качение. Рассматривается как пневматическая,так и гидравлическая схемы преобразования межвиткового элемента. При истирании элемент заменяется на новый, причем эта процедура возможна и в полевых условиях.

3D-анимация - принципиальная схема, показывающая,что система управлением расширением-сжатием рукавов может быть размещена внутри роторов.Это актуально для гидравлической схемы,когда в качестве рабочего вещества вместо воздуха выступает жидкость, а угловая скорость вращения роторов невелика. По моему представлению гидравлическая схема позволит снизить время, необходимое для перевода Теш-Драйва из одного рабочего режима в другой. Для пневматического варианта компрессор будет размещён на раме транспортного средства. Выпускной клапан - внутри, всё управляется электроникой.

Прототип алюминиевый, должен признаться, что это не самый удачный материал для такого рода нагрузок. Но для наглядного пособия,отражающего основные элементы конструкции, вполне подходящий. Приводы - две дрели по 1.2 кВт - слабоваты для работы в шнековом режиме. В целом, пуски показали главное: что принципиально такая компановка транспортного средства возможна, но требует большой конструкторской работы. В режиме колеса модель двигается без отклонения от прямой линии. Были мнения, что её будет уводить в сторону. На воде конструкция показала высокую плавучесть. И что с накаченными, что со спущенными баллонами, скорость перемещения сохранялась практически одна и та же.

да, действительно, при переводе ТЕШ из колеса в шнек и обратно встаёт вопрос складывания излишков длины рукова при сдувании. Этот элемент - основное поле битвы конструкторской мысли, которая ещё впереди.Сам процесс трансформации ТЕШ из режима в режим на тяжёлых машинах с двумя парами шнеко-роторов должен быть полностью автоматизирован. Для этого, как возможный вариант, рукав разделён на две половины и специальные приводы, размещённые внутри ротора, протягивают их концы в спущенном состоянии по направлению друг к другу. Таким образом порожние рукава прижимаются к телу ротора. В активной фазе, когда они заполнены сжатым воздухом, расширяясь, формируют “катки” по краям шнеко-ротора. Для лёгких машин эта операция, возможно, будет выполняться и вручную. Протектор по всей длине рукава с некоторым шагом снабжён петлями и крючками.
|
|
|
Оператор с помощью специального рычага соединяет их между собой,тем самым прижимая порожний рукав к ротору,что минимизирует его износ.При работе ТЕШ в шнековом режиме для прохождения неровностей рама снабжается откидными клинообразными буферами, либо на оси роторов оператор монтирует винтовые конусы. В качестве протектора может быть использован кевлар, титановые шнеко-роторы.
Затем необходимо обратить внимание на то, что транспортное средство в шнековом режиме перемещается только по обводнённым грунтам либо при форсировании водной преграды. В первом случае вода послужит смазкой, что значительно снижает истирание, во втором случае трение минимально. В конце концов возможность перемещаться Теш-Драйв сохраняет, даже если оба баллона пробиты, что позволяет ему покинуть опасную зону своим ходом, чего нельзя сказать, например, о гусеничном приводе, в случае которого потерявший целостность трак обездвиживает машину.
Описываемому техническому решению может быть дано определение как всепогодный, полностью амфибийный движитель. Теперь надо его сопоставить с ближайшим конкурентом. Траки и колесо под это определение явно не подходят: отрежьте трак и поставьте его на воду - он утонет. Хотя были попытки учить его плавать, но безуспешно. Колесо не тонет, но без дополнительных приспособлений не работает как водомёт. Остаётся только один аппарат, подходящий под это определение, - это платформы на воздушной подушке. Они действительно едут и посуху, и по воде, но можно ли их назвать всепогодными? Нет… При сильном ветре эти транспортные средства остаются дома, на приколе. Могут ли они перемещаться в городской черте? Тоже нет - очень слабая управляемость. Вывод один, что полностью самодостаточного амфибийного движителя, невосприимчивого к погодным условиям, на сегодняшний день просто не существует. Как автор, верю, что Теш-Драйв способен занять эту нишу, и в силу уникальности возможностей, которые он предоставляет, оправданы и расходы, связанные с его разработкой и изготовлением. С использованием технологии “Трансформируемых шнеков” возможно создание транспортных систем различного назначения, как гражданского, так и военного.
Дополнительная возможность коммерциализации - это использование концепции ТЕШ в индустрии развлечений. Создание автоматизированных моделей на радиоуправлении и разработка линейки транспортных игрушек. Для популиризации ТЕШ-драйва в настоящее время ведутся переговоры с рядом западных разработчиков компьютерных игр о возможности пояления футуристического транспортного средства в их текущих проектах. Военно-транспортная машина и остальные иллюстрации из этой серии,выложенные на сайте,в основном обращены к производителям транспортной игрушки.

Сама возможность использования идеи в двух независимых индустриях повышает шансы проекта на коммерческий успех.
Прототипом заинтерсовался основатель коллекции нестандартных транспортных средств Даг Хилтон(Museum of creative Invention UK,www.landairandsea.com,Doug Hilton), и, видимо, через некоторое время прототип ТЕШ-драйва присоединится к его коллекции.

Автор проекта - Алексей Бурдин 1977 г.р., по образованию инженер-шахтостроитель,закончил Горный институт. Несколько лет жил и работал в Дублине (Ирландия). По специальности работал в СМУ-13(Метрострой).
Жизненное кредо:Что человек без мечты?...-птица без крыльев!
Мечтаю увидеть ТЕШ-драйв во втором Аватаре.
Сайт изобретателя www.tesh-lab.com




